Позиционирование персонала и техники
Позиционирование персонала и техники в подземных горных выработках существенно повышает эффективность и безопасность добычного процесса. Данные о местоположении объектов непрерывно передаются на рабочую станцию диспетчера, позволяя оперативно распределять ресурсы в повседневной работе и повысить скорость спасательных и эвакуационных мероприятий в случае чрезвычайного происшествия.
Компания Mine Radio Systems предлагает два способа позиционирования:
- Зоновое
- Точное
Зоновое позиционирование
Система позиционирования Flexcom INsite использует зоновый принцип определения местоположения и может зарегистрировать присутствие персонала и техники в радиусе 40-60 метров от устройств считывания. Считыватели устанавливаются в подземных горных выработках в стратегически важных точках: входах в добычную лаву, забоях, перекрестках, развилках, выходах на горизонт и других местах, способствующих пониманию местоположения персонала и подземного транспорта. Flexcom INsite базируется на применении RFID-технологии в диапазоне 400-433 МГц, основными компонентами системы являются считыватели на излучающем кабеле IILB1/IILB2, считыватели на медном кабеле ISIB/ISIB2 и персональные транспондеры IPT, HPT, ISPT, IVT (все названия должны быть ссылками на документацию). Информация об объектах, зарегистрированных в данный момент на считывателях, отображается у диспетчера при помощи ПО МСБ «Flexcom».
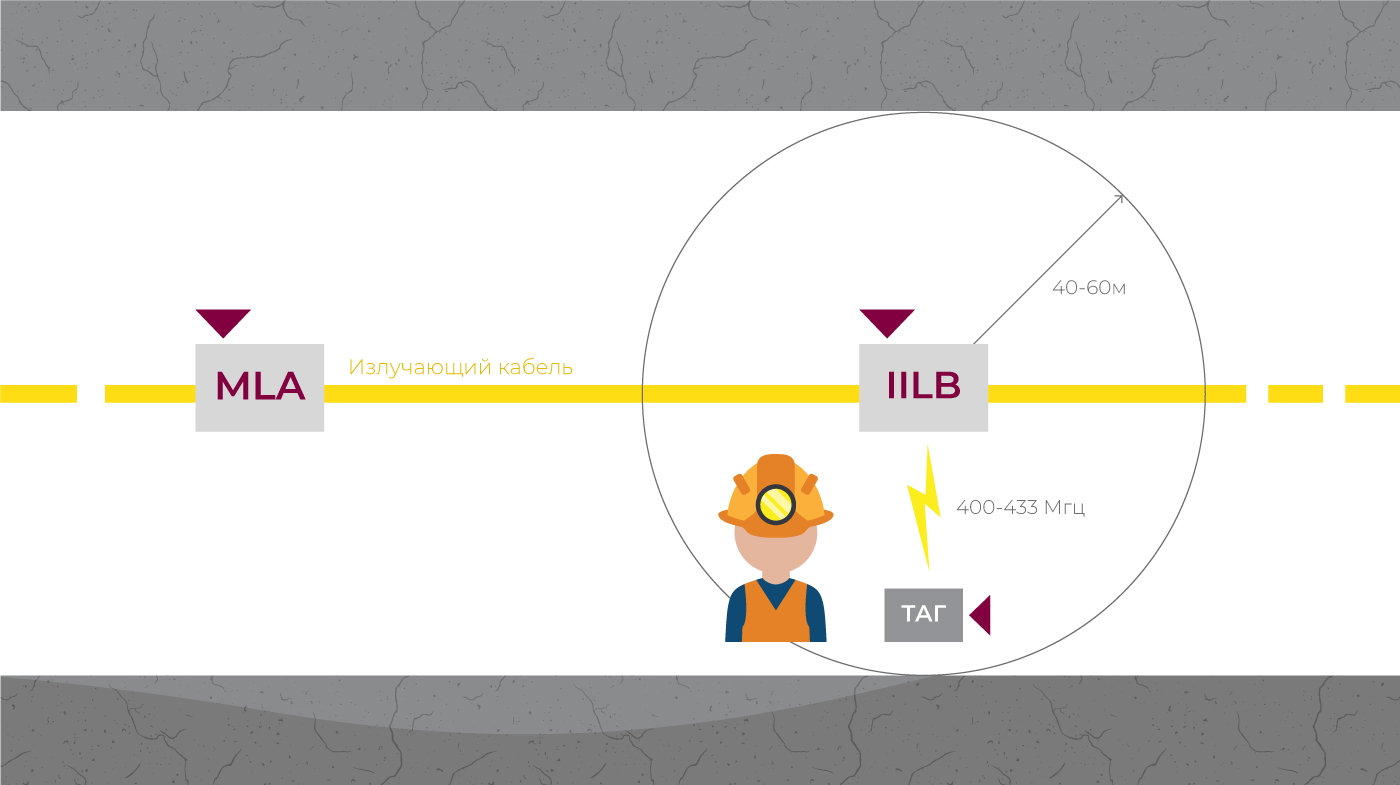

MLA
Линейный усилитель

IILB
Устройство считывания,
предназначено для регистрации
находящихся в радиусе действия
персонала и техники
ТАГ
Персональный транспондер для персонала и
техники
Точное позиционирование
Система точного позиционирования является частью многофункциональной системы «Flexcom» и обеспечивает определение местоположения персонала в подземных выработках с разрешением не более ±20 м с учетом направления и скорости движения объекта.
Система базируется на применении считывателей ISIB3 и персональных транспондеров IPT24, работающих в открытом диапазоне 2,4 ГГц и использует собственные протоколы обмена, основанные на стандарте IEEE 802.15.4. Этот стандарт используется также в качестве основы ZigBee, ISA100.11a, WirelessHART, MiWi, 6LoWPAN.
Система базируется на применении считывателей ISIB3 и персональных транспондеров IPT24, работающих в открытом диапазоне 2,4 ГГц и использует собственные протоколы обмена, основанные на стандарте IEEE 802.15.4. Этот стандарт используется также в качестве основы ZigBee, ISA100.11a, WirelessHART, MiWi, 6LoWPAN.
Подсистема может включать в себя, как собственную среду передачи данных системы Flexcom, так и использовать каналы передачи уже имеющиеся на объекте. В качестве коммутационных узлов применяются искробезопасные мультиинтерфейсные точки доступа МАР2, которые обеспечивают подключение к ВОЛС считывателей системы позиционирования и одновременно могут использоваться для решения других вопросов автоматизации — подключения видеокамер и другого подземного оборудования (опрос и управление) по интерфейсам Ethernet, RS-485, Digital I/O и др.
Система точного позиционирования Flexcom:
- Обеспечивает точность определения местоположения не менее 20 метров с учетом скорости и направления движения объекта
- Может интегрироваться в существующие сети передачи данных или использовать собственные линии связи
- Имеет сегментное построение, которое допускает постепенное внедрение системы на объект
- Имеет «распределенный интеллект», то есть инициальная обработка данных производится под землей
- Может быть получена путем модернизации существующих систем зонового позиционирования
- Может комплектоваться Wi-Fi модулями для организации резервирования, сбора данных или предоставления доступа в Интернет
- Имеет ряд интерфейсов для решения вопросов автоматизации – Ethernet, RS-485, Digital I/O и др.
- Накапливает данные о местоположении в случае обрыва линии связи и пересылает их на сервер после восстановления линии
- Позволяет реализовывать многочисленные дополнительные возможности на базе собственной инфраструктуры: системы блокировки рабочих органов комбайнов, системы предотвращения столкновений и наездов, проезда перекрестков
Сегменты точного позиционирования на ВОЛС
Сегменты точного позиционирования Flexcom могут использовать существующие волоконно-оптические линии связи в качестве магистральной линии передачи данных.
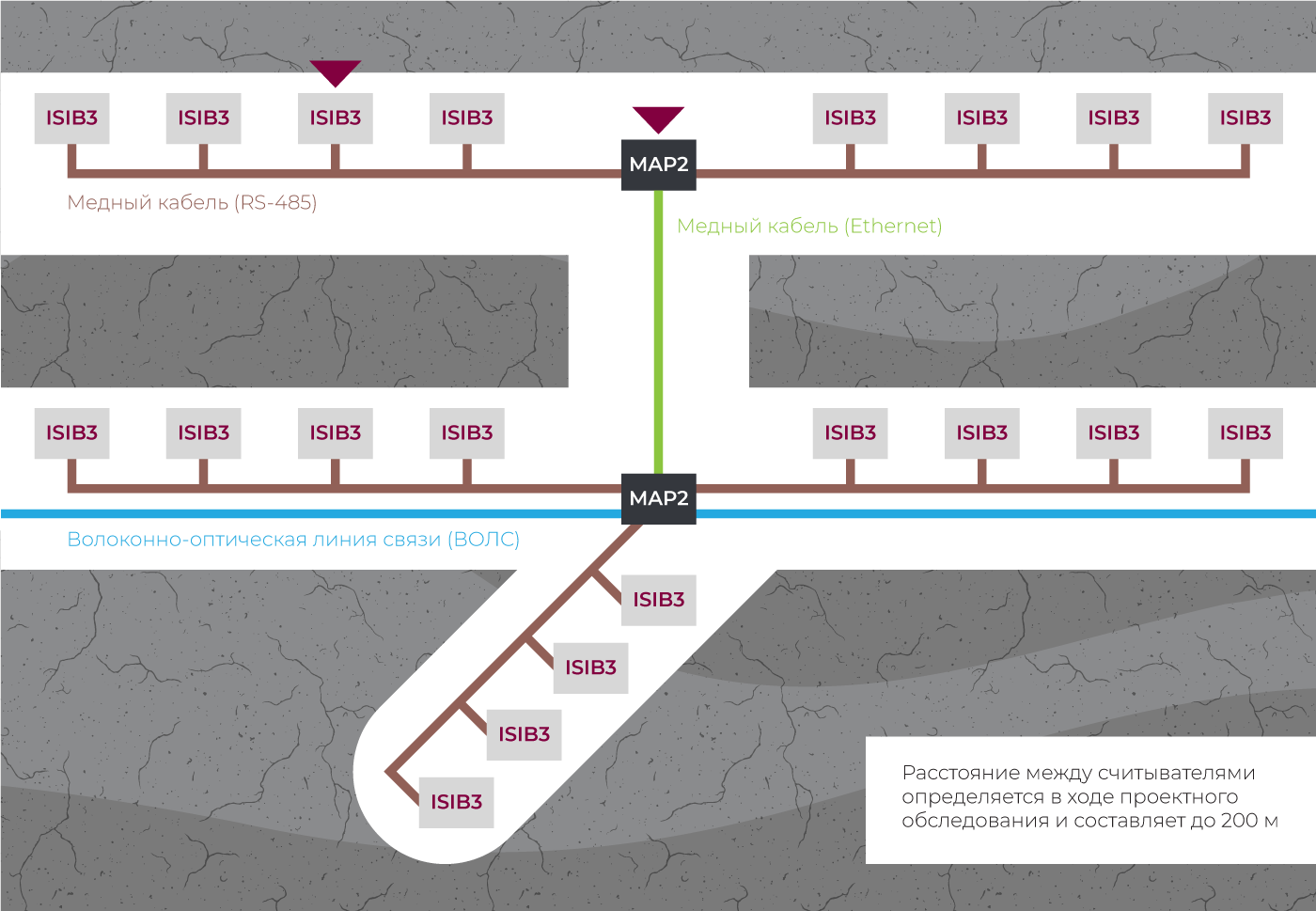

ISIB3
Cчитыватель диапазона 2,4 ГГц

MAP2
Мультиинтерфейсная точка
доступа (головное устройство
сегмента)
Сегменты точного позиционирования на излучающем кабеле
Если на руднике или шахте уже развернута система зонового позиционирования INsite, в качестве магистрали можно использовать существующий излучающий кабель. Для этого необходимо дооснастить считыватели зонового позиционирования IILB1 (433 МГц) контроллерами радиоинтерфейса ISBRF (2,4 ГГц) и установить транспондеры IPT24 (2,4 ГГц) в шахтные фонари. Расстояние между считывателями определяется в ходе проектного обследования и составляет до 200 м.
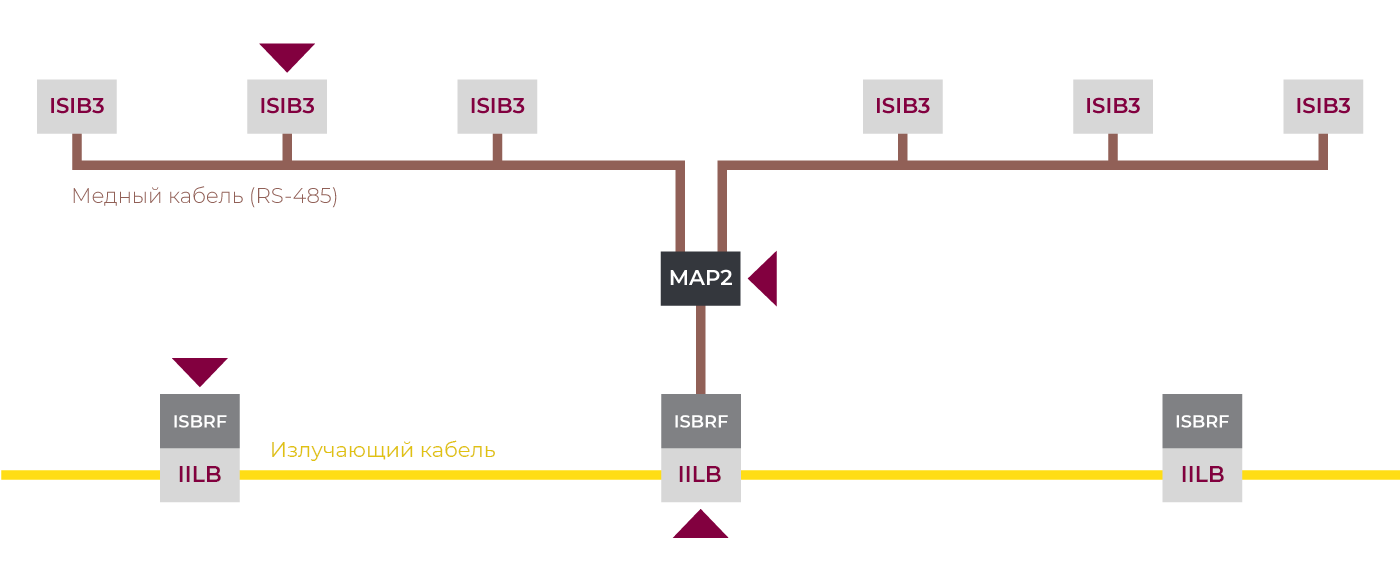
ISBRF
Контроллер радиоинтерфейса 2,4 ГГц
ISIB3
Cчитыватель диапазона 2,4 ГГц
IILB
Считыватель диапазона 433 МГц
MAP2
Мультиинтерфейсная точка
доступа (головное устройство
сегмента)
Организация беспроводной сети считывателей системы точного позиционирования при подключении к координатору на излучающем кабеле
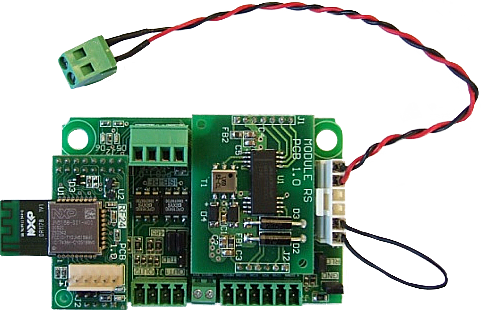
На сложных или временных участках объекта могут устанавливаются беспроводные сегменты точного позиционирования. Координатором такого сегмента выступает устройство IILB1 с платой ISB-RF, а считывателями являются беспроводные узлы WTN2, автономные по питанию.
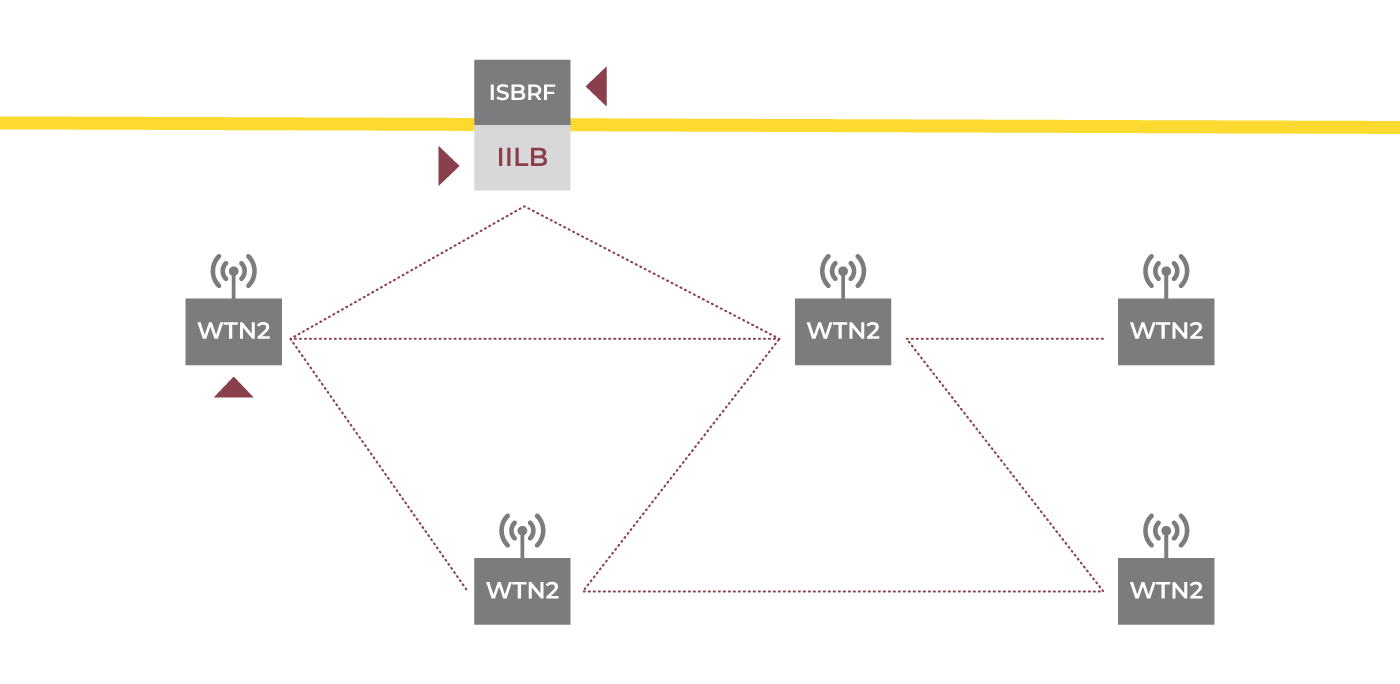
IILB
Считыватель диапазона 433 МГц
ISBRF
Контроллер радиоинтерфейса 2,4 ГГц

WTN2
Считыватель меток позиционирования с
автономным питанием для работы в
мэш-сети (беспроводной сети передачи)
Правила построения сегмента точного позиционирования
При построении сегмента системы точного позиционирования, включающего устройства считывания ISIB3 и головное устройство сегмента МАР2 (мультиинтерфейсная точка доступа) следует учитывать следующие аспекты:
- Cчитыватели должны устанавливаться в подземных выработках последовательно на расстоянии прямой видимости друг от друга, при этом расстояние между смежными считывателями до 200 м (типично 100 м)
- Cчитыватели соединяются между собой витым медным кабелем по шинной топологии интерфейса RS-485, образуя ветвь
- Головное устройство сегмента МАР2 позволяет подключить к портам интерфейса RS-485 одну или две ветви считывателей. Подключение каждой из ветвей к порту интерфейса RS-485 мультиплексора МАР2 можно производить на любом участке ветви, что способствует рациональной организации ответвлений
- Максимальное количество считывателей на одной ветви – 15
- Общая длина ветви не должна превышать 1000 м (максимально 1200 м) кабеля (т.е. с учетом прокладки: обычно +10% к расстояниям прямой видимости)
- Шинная топология интерфейса RS-485 предусматривает подключение устройств по 2-м информационным проводам и 2-м проводам питания. Питание считывателей обеспечивается от МАР2 (+12/24 В)
Метод точного измерения
Обеспечение заданной точности ±20 м осуществляется за счет комбинации нескольких принципов измерения расстояний, в частности определения времени задержки распространения радиосигнала Time of Flight, измерения уровня сигнала Received Signal Strength Indication и использования статистических методов оценки многократного обмена данными между подвижными и стационарными компонентами системы.
Между устройствами системы производится многократный обмен запросами и подтверждениями, по которым оценивается задержка времени. Устройство-инициатор процесса измеряет общее время (Total Time, Ttot) между передачей запроса (Poll) и получением подтверждения (ACK). Встречное устройство передает время, затраченное на выдачу подтверждения Turnaround Time (Ttat). Вычитание этого времени из Total Time дает двойное время прохождения дистанции между устройствами.
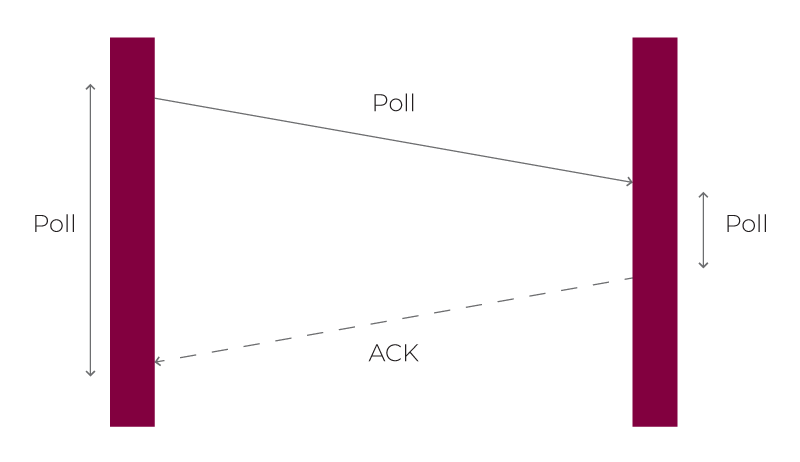
В реальных условиях присутствуют множественные отражения радиосигнала, что приводит к разбросу измерений в зависимости от того, по какому пути сигнал был принят. С целью минимизировать ошибку измерения расстояния, измерения производятся многократно, причем инициаторами запроса выступают попеременно, как считыватель, так и персональный транспондер. Это позволяет более точно оценить влияние окружающего пространства на величину отраженных сигналов и, после математической обработки полученного массива измерений, отфильтровать сигналы прямой видимости от отраженных и получить время их прохождения.
Комбинация механизмов Time of Flight и Received Signal Strength Indication позволяет получить точность позиционирования на дистанции 100 метров не хуже 10 метров и на дистанции в несколько метров не хуже 0,5 метра, что позволяет использовать описываемый интерфейс в системах предотвращения столкновений транспортных средств и предотвращения наезда на персонал.